

Différence de performance du moteur 1 : vitesse/couple/taille
Il existe toutes sortes de moteurs : des gros moteurs, des petits moteurs, des moteurs à mouvement de va-et-vient, et même des moteurs dont le prix élevé ne saute pas aux yeux. Pourtant, chaque moteur est choisi pour une raison précise. Alors, quelles sont les caractéristiques, les performances et le type de moteur idéal ?
Cette série a pour but de vous apprendre à choisir le moteur idéal. Nous espérons qu'elle vous sera utile lors de votre choix et qu'elle permettra à chacun d'appréhender les bases du fonctionnement des moteurs.
Les différences de performance à expliquer seront divisées en deux sections distinctes comme suit :
Vitesse/Couple/Dimensions/Prix ← Les éléments que nous aborderons dans ce chapitre
Précision de la vitesse/fluidité/durée de vie et facilité d'entretien/génération de poussière/efficacité/chaleur
Production d'énergie/contre-mesures en matière de vibrations et de bruit/d'échappement/environnement d'utilisation
1. Attentes concernant le moteur : mouvement de rotation
Un moteur désigne généralement un appareil qui convertit l'énergie électrique en énergie mécanique, et le plus souvent un moteur produisant un mouvement de rotation. (Il existe aussi des moteurs linéaires qui produisent un mouvement rectiligne, mais nous n'en parlerons pas ici.)
Alors, quel type de rotation recherchez-vous ? Une rotation puissante comme celle d'une perceuse, ou une rotation faible mais rapide comme celle d'un ventilateur ? En considérant la différence de mouvement de rotation souhaité, la vitesse et le couple deviennent deux propriétés essentielles.
2. Couple
Le couple est la force de rotation. Son unité est le N·m, mais pour les petits moteurs, on utilise généralement le mN·m.
Le moteur a été conçu de différentes manières afin d'augmenter le couple. Plus le nombre de spires du fil électromagnétique est élevé, plus le couple est important.
Le nombre de spires étant limité par la taille fixe de la bobine, on utilise du fil émaillé de plus grand diamètre.
Notre gamme de moteurs sans balais (TEC) est disponible en huit diamètres extérieurs : 16 mm, 20 mm, 22 mm, 24 mm, 28 mm, 36 mm, 42 mm et 60 mm. La taille de la bobine augmentant avec le diamètre du moteur, un couple plus élevé est obtenu.
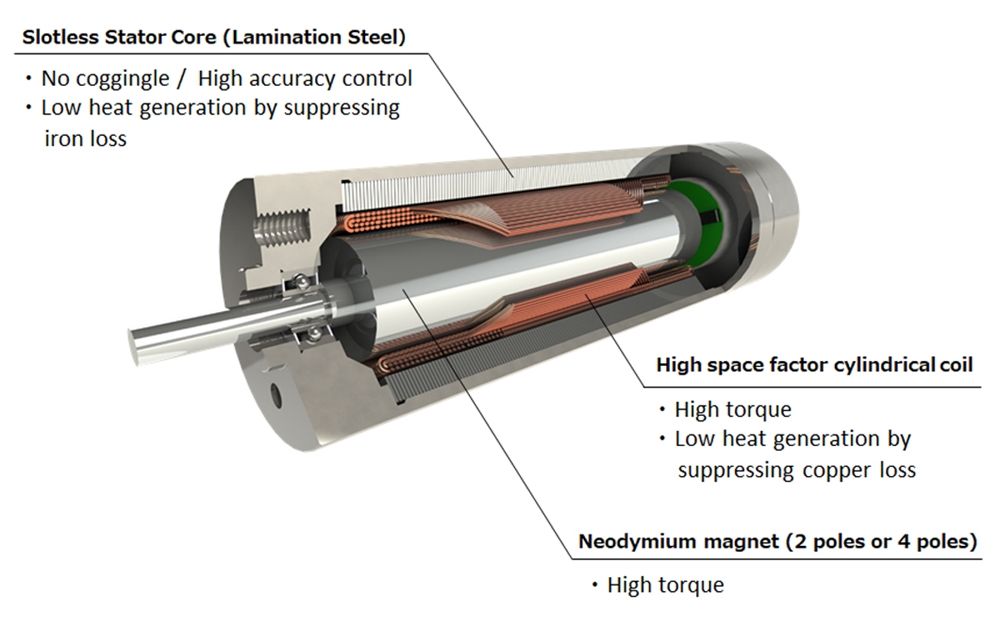
Des aimants puissants permettent de générer des couples importants sans modifier la taille du moteur. Les aimants en néodyme sont les aimants permanents les plus puissants, suivis des aimants samarium-cobalt. Cependant, même avec des aimants puissants, la force magnétique s'échappe du moteur et ne contribue pas au couple.
Pour tirer pleinement parti du fort magnétisme, une fine couche de matériau fonctionnel appelée plaque d'acier électromagnétique est laminée afin d'optimiser le circuit magnétique.
De plus, comme la force magnétique des aimants en samarium-cobalt est stable face aux variations de température, l'utilisation d'aimants en samarium-cobalt permet d'entraîner le moteur de manière stable dans un environnement présentant d'importantes variations de température ou des températures élevées.
3. Vitesse (tours)
Le nombre de tours d'un moteur est souvent appelé « vitesse ». Il s'agit du nombre de rotations effectuées par le moteur par unité de temps. Bien que l'on utilise couramment « tr/min » pour désigner les tours par minute, on l'exprime également en « min⁻¹ » dans le système international d'unités (SI).
Augmenter le nombre de tours par rapport au couple est techniquement simple. Il suffit de réduire le nombre de spires de la bobine. Cependant, le couple diminuant lorsque le nombre de tours augmente, il est important de respecter à la fois les exigences de couple et de vitesse de rotation.
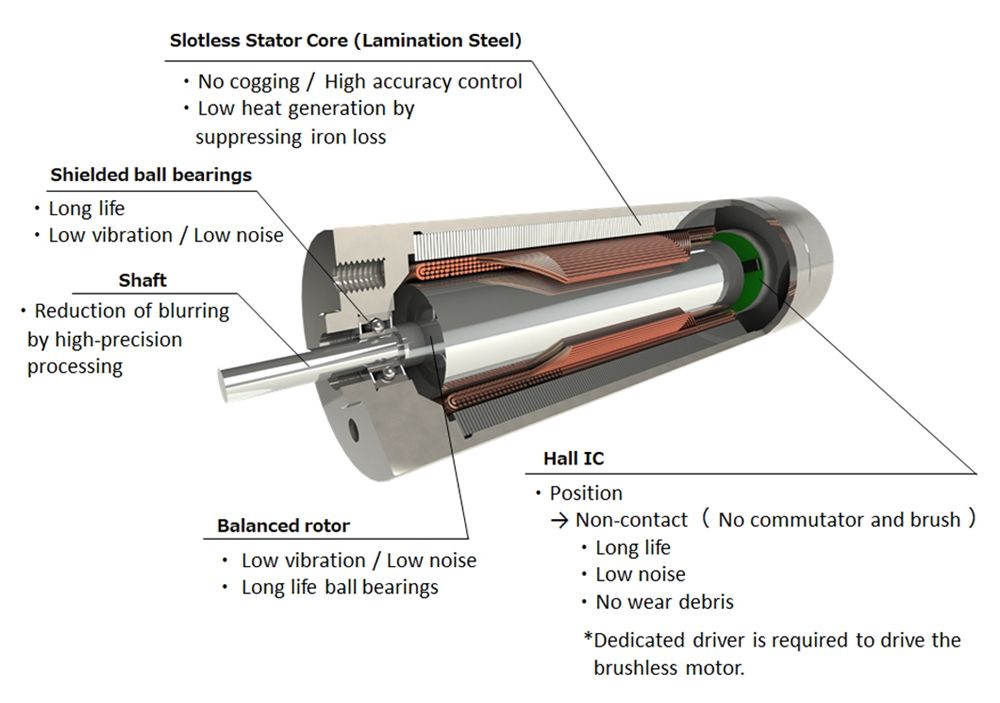
De plus, pour une utilisation à haute vitesse, il est préférable d'utiliser des roulements à billes plutôt que des paliers lisses. Plus la vitesse est élevée, plus les pertes par frottement sont importantes et plus la durée de vie du moteur est courte.
En fonction de la précision de l'arbre, plus la vitesse est élevée, plus les problèmes de bruit et de vibrations sont importants. Un moteur sans balais, dépourvu de balais et de collecteur, produit moins de bruit et de vibrations qu'un moteur à balais (dont les balais sont en contact avec le collecteur rotatif).
Étape 3 : Taille
En matière de moteur idéal, la taille du moteur est un facteur déterminant de ses performances. Même si la vitesse (tours) et le couple sont suffisants, cela n'a aucun intérêt si le moteur ne peut être installé sur le produit final.
Si votre seul objectif est d'augmenter la vitesse, vous pouvez réduire le nombre de spires du fil, même si ce nombre est faible. Cependant, sans un couple minimal, la rotation ne se fera pas. Il est donc nécessaire de trouver des moyens d'augmenter ce couple.
Outre l'utilisation d'aimants puissants, il est également important d'augmenter le rapport cyclique de l'enroulement. Nous avons évoqué la réduction du nombre de spires pour garantir le nombre de tours, mais cela ne signifie pas que le fil est enroulé de manière lâche.
En utilisant des fils épais plutôt qu'en réduisant le nombre de spires, on peut obtenir un courant important et un couple élevé, même à vitesse égale. Le coefficient spatial indique la densité de l'enroulement. Qu'il s'agisse d'augmenter le nombre de spires fines ou de réduire celui des spires épaisses, ce coefficient est un facteur déterminant pour le couple.
En général, la puissance d'un moteur dépend de deux facteurs : le fer (aimant) et le cuivre (enroulement).
Date de publication : 21 juillet 2023